研究事例

AIMaP成果事例集
研究テーマ
数式・数値融合計算に基づくロバストなロボットの運動計画
研究者名 照井 章 研究者所属 筑波大学 数理物質系,人工知能科学センターキーワード ロボット工学,逆運動学問題,計算機代数,グレブナー基底,限量子消去
研究内容
A:どんな諸分野・企業の、どんな問題や現象をターゲットにしたか。
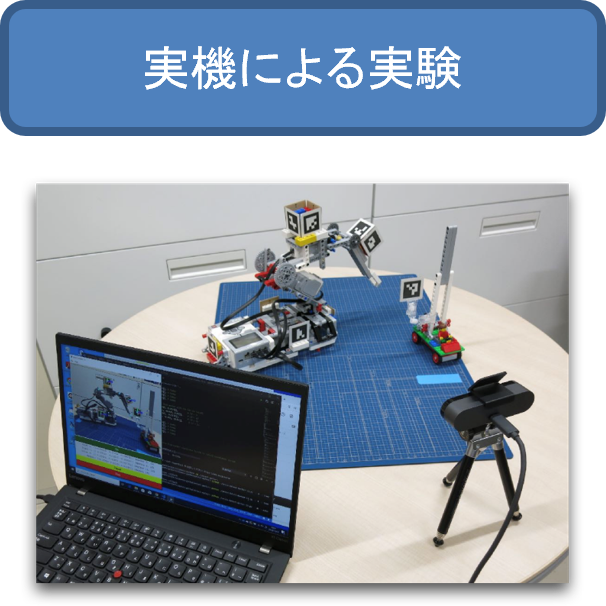
ロボット工学における,腕型ロボット(マニピュレータ)の逆運動学問題。マニピュレータのエンドエフェクタ(手先)の目標位置が与えられた際,そこへ移動させるためのジョイント(関節)の配置を求める。
B:どんな数学・数理科学をどのように使ったか。
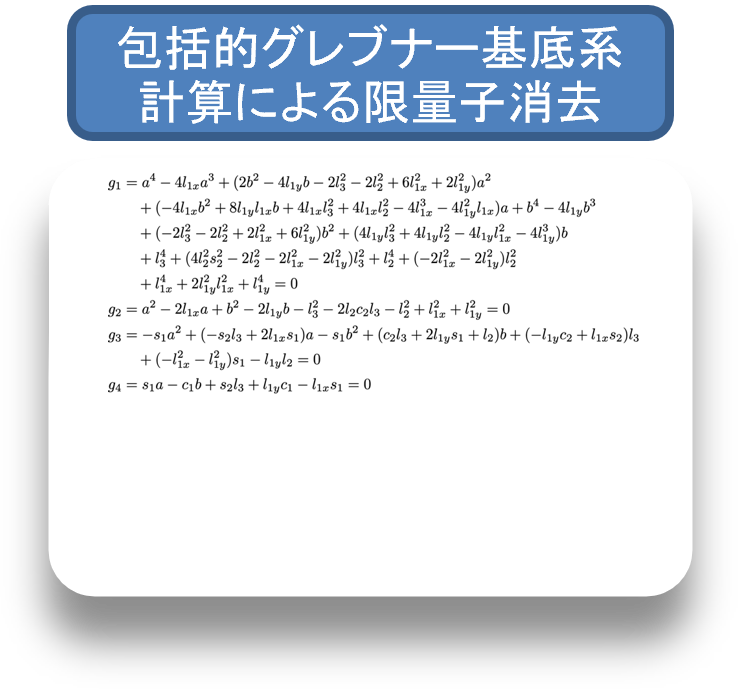
包括的グレブナー基底系計算に基づく限量子消去により,与えられた逆運動学問題に実数解が存在することを確認した上で,包括的グレブナー基底系を用いて連立代数方程式を解くことで,目的とするジョイントの配置を求める。
C:どんな成果が得られたか。(あるいは、どんな成果を目指しているか。)
逆運動学問題の大域的な性質を正確に捉えた求解や,設計パラメータを変数で表すことによる動作計画の最適化などを,数式処理と数値計算の融合で実現することにより,ロバストかつ効率的なロボットの動作計画技術の実用化を目指している。
D:どのようなきっかけでその諸分野・企業との連携が始まったか。
学内のロボット工学の研究者と学内業務で同席した際,たまたま双方の研究内容の話になり,当時,当方が計算機代数の応用を模索していた一方,先方は研究中に現れた数理的問題の解法を模索していたことから,双方の問題を持ち寄ることで共同研究が始まった。